















共執行 13 個查詢,用時 0.076080 秒,在線 667 人,Gzip 已啟用,佔用記憶體 3.378 MB
Powered by GEJOREv2.7.3






GR6309
。APM 2.5 2.6 2.8光流傳感器 Optical Flow v10 無GPS定點
為了提高不能用GPS的環境的位置保持的精度,APM:Copter現在支持基於鼠標傳感器的光流傳感器 Optical Flow V1.0
。
已知問題
■ 傳感器只能在光線好的環境下工作
■ 因為使用定焦鏡頭,所以不能對近於30厘米的物體對焦。
■ 旋轉傳感器將使傳感器混亂
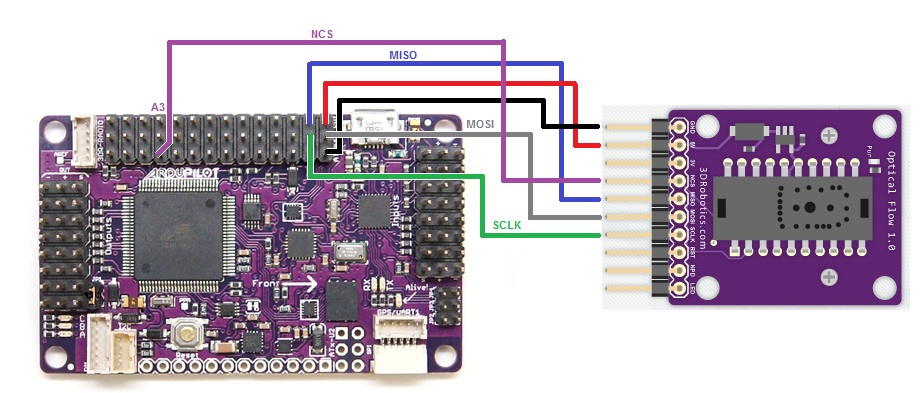
連接傳感器至 APM2.5 / APM2.5.2 / APM2.6 / APM2.8 均可使用
如下圖所示,連接 VCC, GND, MISO, MOSI, SCLK 和 NCS 引腳
默認的安裝方式是鏡頭朝下,引腳朝前 。
。
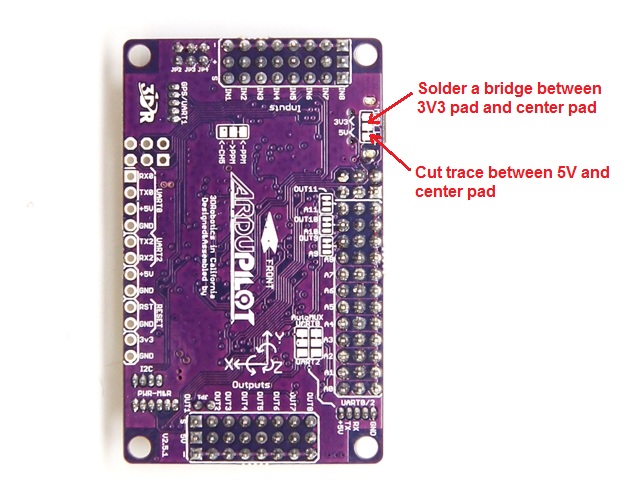
斷開板子背面 的 MISOLVL 跳線,重新焊接使 MISO 引腳工作在 3.3v。 這非常重要,確保光流傳感器不會干擾 MPU6000。
測試傳感器
● 上傳測試sketch到APM:
如果使用的是APM2,你可以在下載區下載hex文件,然後使用Mission Planner的初始設置 >。 Install Firmware >。 Load custom firmware的鏈接,上傳到你的APM2
如果你使用的是APM1,你需要打開Arduino IDE 加載AP_OpticalFlow_test.pde,編譯並上傳到你的APM1
● 用串口監視器或 AP Mission Planner終端連接 APM
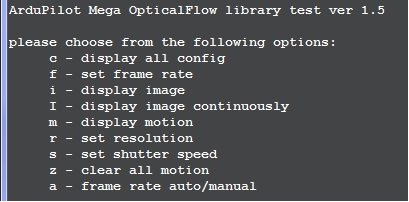
● 輸入 &。apos。c&。apos。,確保傳感器響應APM
● 輸入 &。apos。m&。apos。,把攝像頭前後啟動,檢查 x,y 值變化。 如果沒有變化,左右旋轉鏡頭調整焦距。
●
。
| 會員名稱 | 購買數量 | 購買時間 | 訂單狀態 |
| gor***** | 1 | 01-29 | 成交 |
| x12***** | 1 | 11-23 | 成交 |
| a86***** | 1 | 09-26 | 成交 |
| emp***** | 1 | 05-07 | 成交 |
| yeh***** | 1 | 11-06 | 成交 |
| dar***** | 1 | 10-11 | 成交 |
| min***** | 1 | 03-29 | 成交 |
| s84***** | 1 | 03-17 | 成交 |
| zen***** | 1 | 11-17 | 成交 |
| wen***** | 1 | 11-14 | 成交 |